LASA

Current highlights
Robotics at EPFL is an interfaculty initiative that connects and promotes EPFL’s advanced expertise
in robotics and autonomous systems. Check it out!

LASA teamed up with MIT press to publish a textbook presenting a wealth of machine learning techniques to make robot control more flexible and safer when interacting with humans.
The Innovation Booster Robotics, lead by Professor Aude Billard, is a program powered by the Swiss Innovation Agency, Innosuisse. Innovation Booster Robotics promotes knowledge transfer and sponsors co-operation with partners across robotics research labs and industry.
Research at LASA




Current project grants
Robetarme
Human-robot collaborative construction system for shotcrete

SAHR
ERC Advanced Grant: Skill acquisition in humans and robots (SAHR)

Hasler Stiftung
Four-arms manipulation and applications to surgery
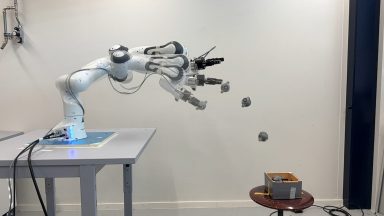
EU I.AM Project
From pick-and-place to grab-and-toss

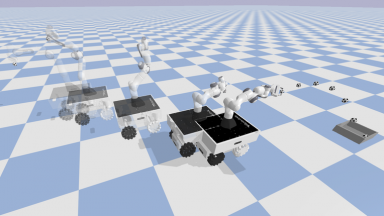
EU DARKO
Dynamic agile robots that learn and optimize operations

Microsurgery
Qualitative assessment of skills and skill acquisition in microsurgery
Past project grants

EU Crowdbot project
Safe navigation of robot in crowd

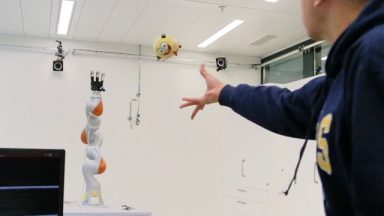
CHISTERA CORSMAL
Estimate the physical properties of objects for safe handover from / to humans
Swiss SNF – NCCR
Robotics National Center of Competence in Research

Secondhands
Creating a proactive robot assistant for maintenance tecnicians
EU CogIMon
A EU-funded research project for Cognitive Interactive Motion

Alterego
An EU funded project to work on humanoid robotics and virtual reality to improve social interactions